
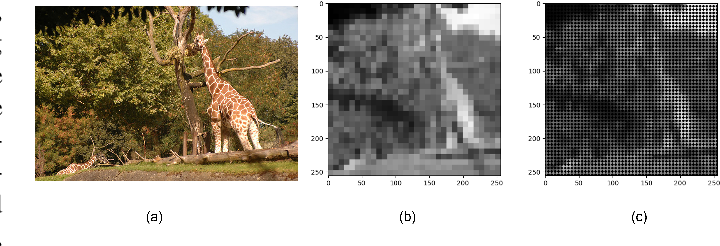
Enhancing Scene Simplification and Optimization for Retinal Prosthesis Platform
Retinal prostheses are designed to aid individuals with retinal degenerative conditions such as Retinitis Pigmentosa (RP) and Age-related Macular Degeneration (AMD). These prostheses seek to restore vision and improve the perceived scene by stimulating degenerated retinal cells using retinal stimulating electrodes. While these electrodes allow more efficient interaction with the surroundings, they offer limited resolution.This paper presents an innovative approach to revolutionize the visual perception of retinal prosthesis users. The key idea behind the proposed approach is to fuse
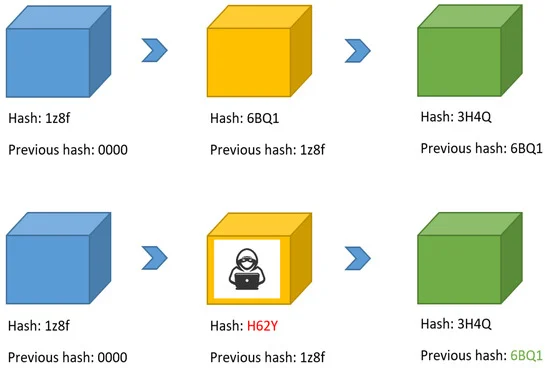
Smart Automotive Diagnostic and Performance Analysis Using Blockchain Technology
The automotive industry currently is seeking to increase remote connectivity to a vehicle, which creates a high demand to implement a secure way of connecting vehicles, as well as verifying and storing their data in a trusted way. Furthermore, much information must be leaked in order to correctly diagnose the vehicle and determine when or how to remotely update it. In this context, we propose a Blockchain-based, fully automated remote vehicle diagnosis system. The proposed system provides a secure and trusted way of storing and verifying vehicle data and analyzing their performance in
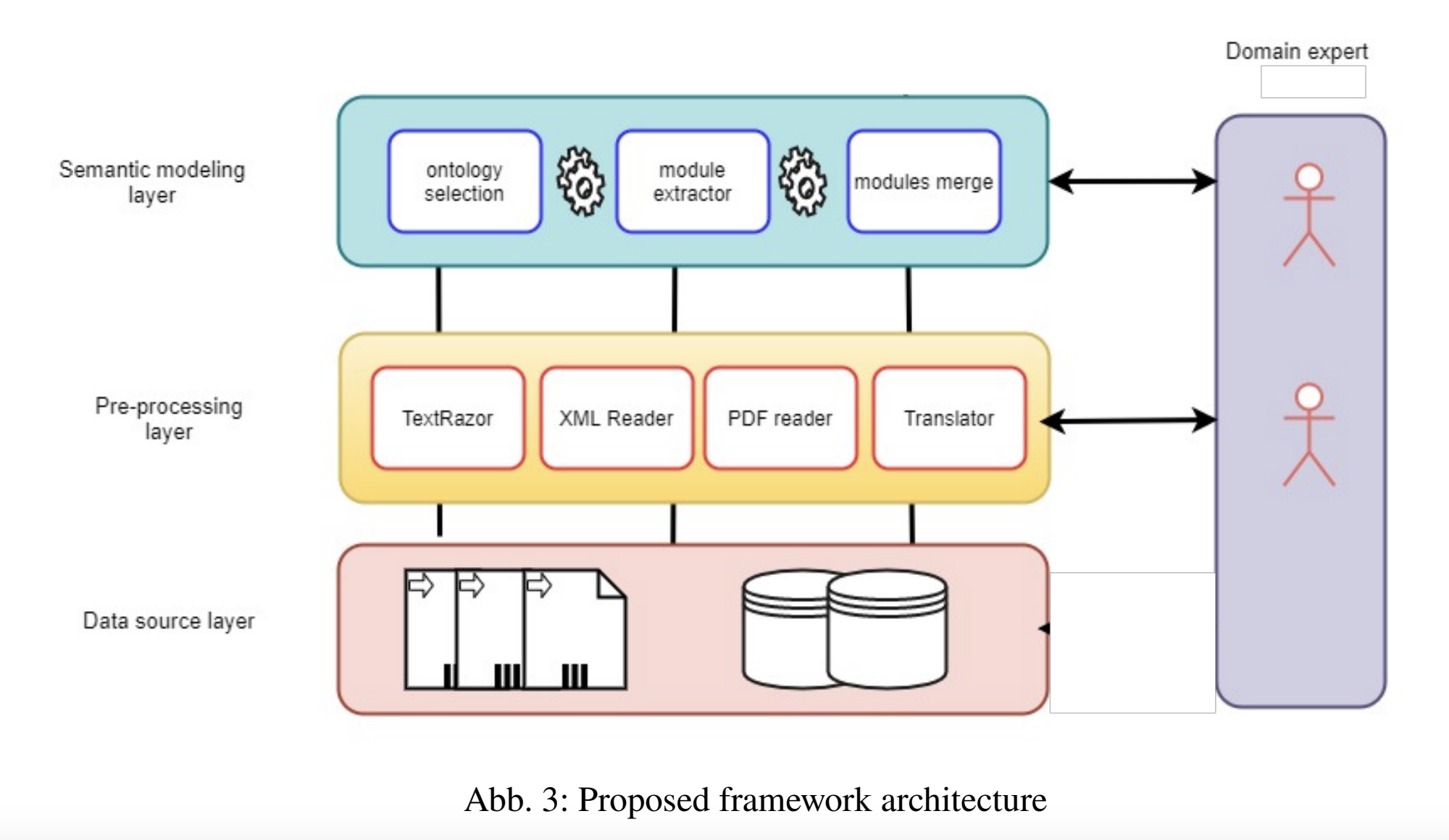
A Core Ontology to Support Agricultural Data Interoperability
The amount and variety of raw data generated in the agriculture sector from numerous sources, including soil sensors and local weather stations, are proliferating. However, these raw data in themselves are meaningless and isolated and, therefore, may offer little value to the farmer. Data usefulness is determined by its context and meaning and by how it is interoperable with data from other sources. Semantic web technology can provide context and meaning to data and its aggregation by providing standard data interchange formats and description languages. In this paper, we introduce the design
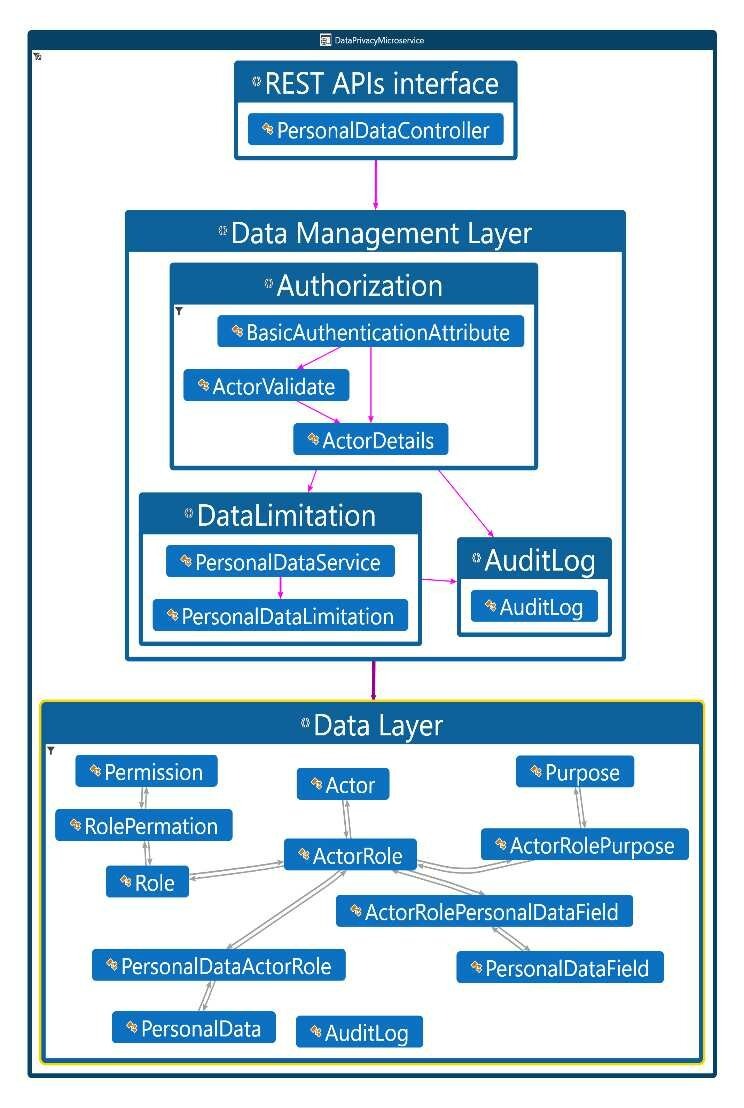
Privacy by Design: A Microservices-Based Software Architecture Approach
Data privacy regulations have increased significantly recently. As a result, privacy by design (PbD) has become a critical consideration for enterprises that handle personal data. PbD is no longer a plain principle. Rather than that, the General Data Protection Regulation (GDPR) addresses PbD as a required legal requirement for controllers who may face fines for non-compliance with the GDPR. In this paper, we propose a practical solution, 'PbD Microservice,' that can help organizations to achieve privacy regulatory compliance. We will focus on GDPR, one of the most important regulations that
A Framework for Reporting Ergonomic Sitting Posture Anomalies
Application of ergonomics' rules has become a necessity in today's world. Due to the lack of knowledge of what these rules are and the resources needed to fund them, a lot of people develop health issues. One of the most common health issues relate to sitting in a wrong posture for extended period.In this document, a framework that can help in minimizing the existence of the sitting posture anomaly is proposed. This framework takes into account using limited resources as well as being able to apply it in a home environment. © 2022 IEEE.
Ibn Sina: A patient privacy-preserving authentication protocol in medical internet of things
The prosperous advancement in Medical Internet of Things (MIoT) technologies has hastened the development of healthcare systems. MIoT improves the traditional medical facilities through periodically monitor of patient's health records. Electronic Medical Records (EMRs) are sensitive private data and needs efficient secure and private schemes that interchange these EMRs between healthcare providers and patients. Most of the current privacy preserving schemes do not provide the desired privacy level and suffer from computation and communication overheads. The length of an IDentity-based Strong
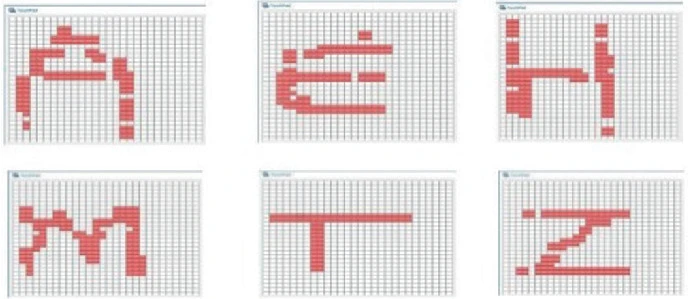
Handwriting Letter Recognition on the Steering Wheel Switches
Automotive steering wheel switches technologies are evolving to give easy access to the several interior or exterior functions. This is worth a deep analysis for the current trends in order not to become unintuitive for the driver due to the increasing number of buttons. Through different technologies particularly the capacitive ones, range of innovative solutions have been developed like reconfigurable buttons on the steering wheel to offer commanding several functions twice or triple the number of allocated push buttons. In this paper, we address the problem in a different freely way to
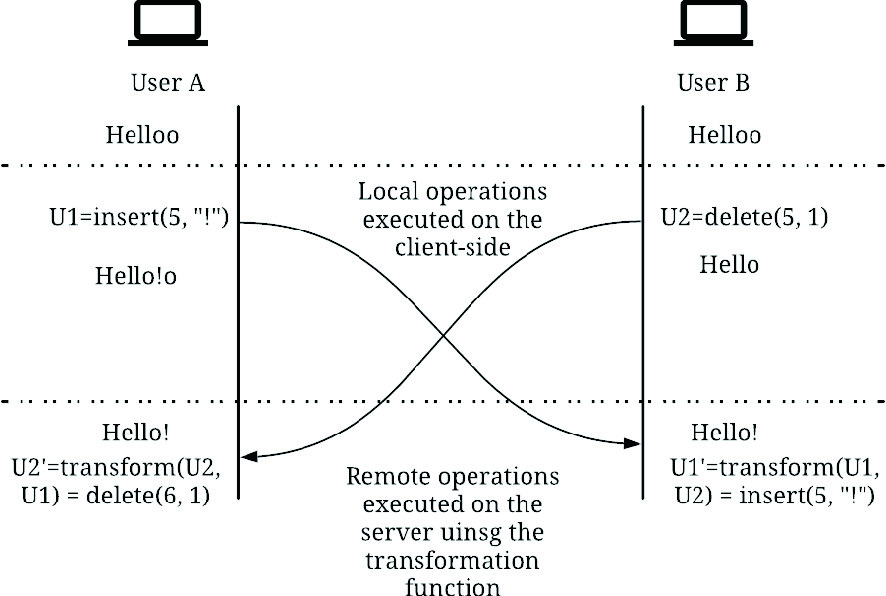
A Survey of Concurrency Control Algorithms in Collaborative Applications
Collaborative applications are becoming more prevalent for a variety of reasons, most important of which is the increased interest in remote work. In addition to adapting the business processes to a remote setting, designers of collaborative software have to decide on how their software can be used collaboratively. This paper discusses the two main technologies used to enable network-based real- or near-real-time collaborative software, namely Operational Transformation and Conflict-free Replicated Data Types. Recent developments in each technology are discussed, as well as a brief overview of
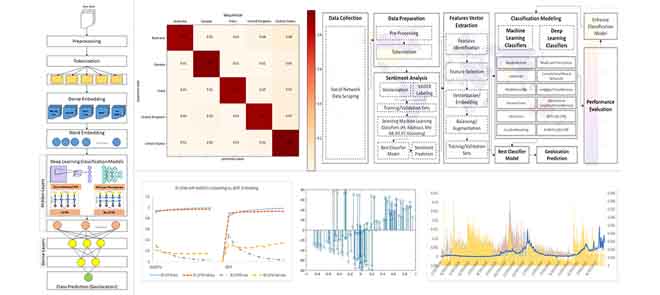
Sentiment-Based Spatiotemporal Prediction Framework for Pandemic Outbreaks Awareness Using Social Networks Data Classification
According to the World Health Organization, several factors have affected the accurate reporting of SARS-CoV-2 outbreak status, such as limited data collection resources, cultural and educational diversity, and inconsistent outbreak reporting from different sectors. Driven by this challenging situation, this study investigates the potential expediency of using social network data to develop reliable early information surveillance and warning system for pandemic outbreaks. As such, an enhanced framework of three inherently interlinked subsystems is proposed. The first subsystem includes data
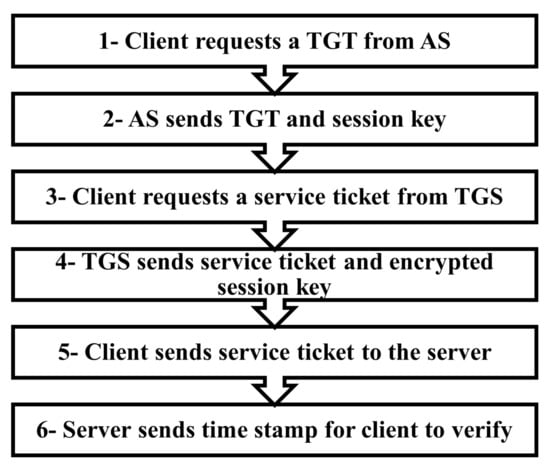
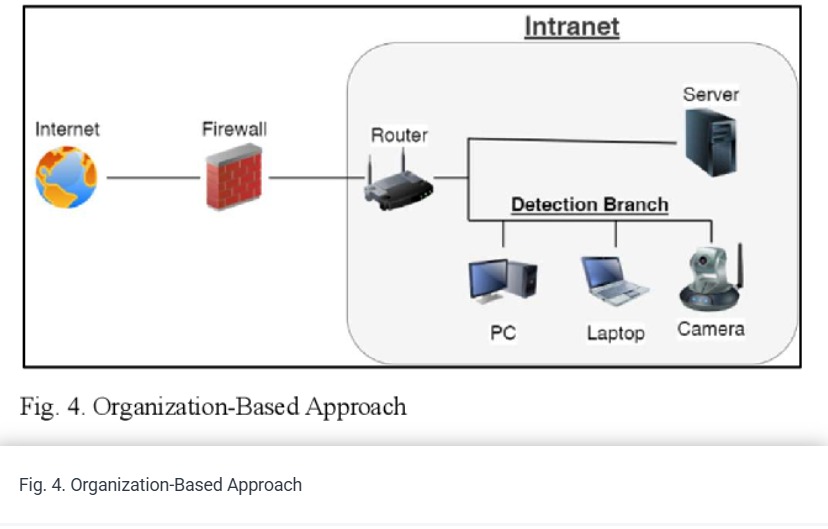
Active Directory Attacks—Steps, Types, and Signatures
Active Directory Domain is a Microsoft service that allows and facilitates the centralized administration of all workstations and servers in any environment. Due to the wide use and adoption of this service, it has become a target for many attackers. Active Directory attacks have evolved through years. The attacks target different functions and features provided by Active Directory. In this paper, we provide insights on the criticality, impact, and detection of Active Directory attacks. We review the different Active Directory attacks. We introduce the steps of the Active Directory attack and